研究笔记
2025-11-26
Project 1 MP3D基线模型讲解
讲解 Project1 Task2 中 Seq2Seq 基线模型的实现细节,并分析训练指标(SR、SPL、NavError)的预期趋势与含义。
记录 UAV / 具身智能 / VLN 的学习与实践。
标签
共 9 篇文章
知识路线图
按时间大致梳理与「Navigation」相关的文章,可作为学习路线的参考。
讲解 Project1 Task2 中 Seq2Seq 基线模型的实现细节,并分析训练指标(SR、SPL、NavError)的预期趋势与含义。
Project 3: REVERIE数据集与DUET模型 总体目标 深入理解 **REVERlE (Remote Embodied Visual Referring Expression in Real Indoor Environments)**数据集结构及路径可视化方法。 掌握并复现 **DUET(Dual-scale Graph Transformer)**模型,理解其在多模态指令导航与目标定位中的工作机制。 REVERlE 发音 [ˈrev
AerialVLN模拟器与AirVLN任务 总体目标 1.掌握AerialVLN模拟器的安装 学会如何搭建AerialVLN模拟器。 2.复现AirVLN任务 准备AirVLN相关的数据集,并了解数据组成,复现AirVLN任务。 任务0 建立工作目录 mkdir AirVLN_ws
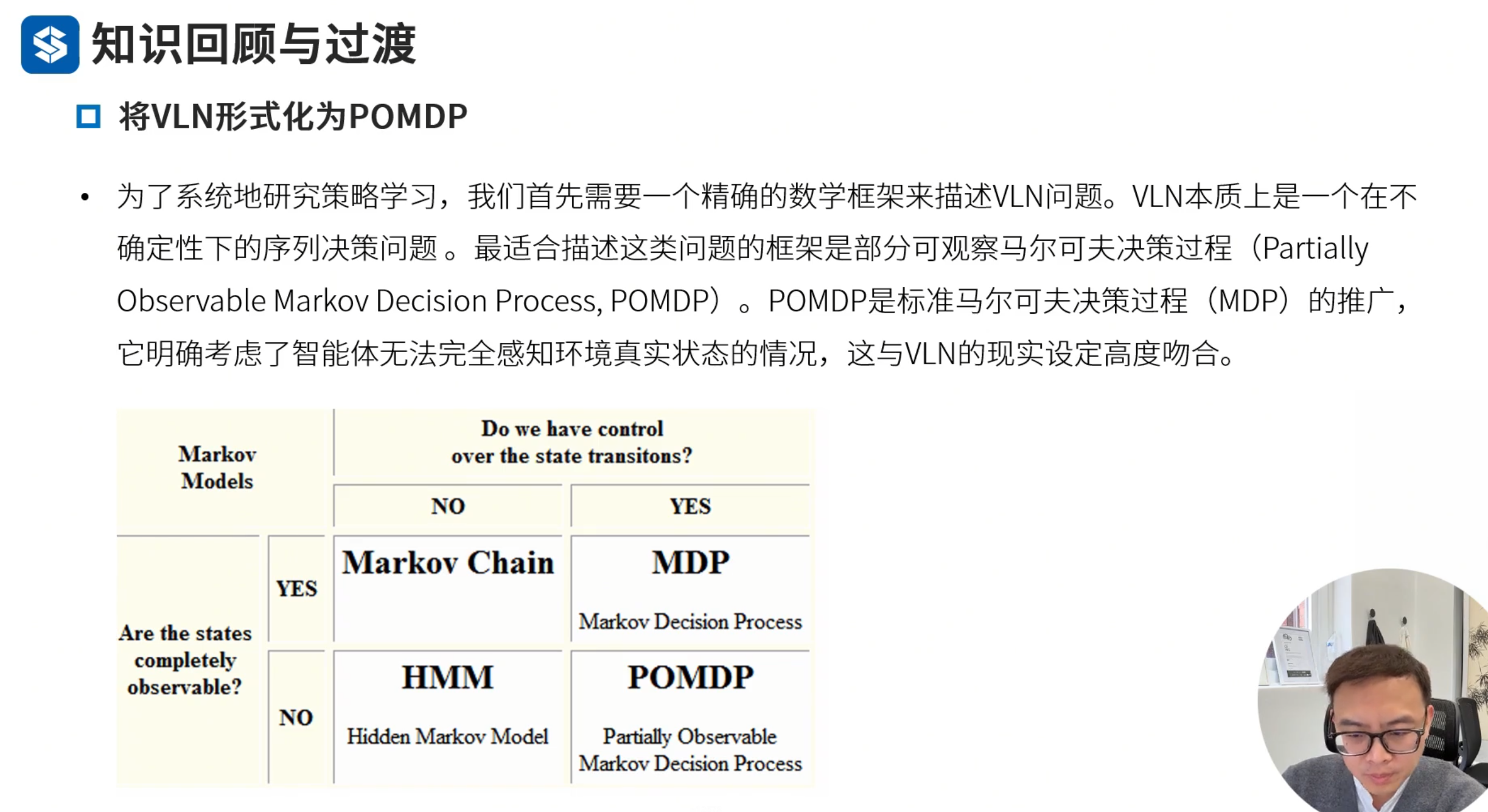
详解DeepSeek-R1核心强化学习算法:GRPO https://zhuanlan.zhihu.com/p/21046265072 VLN课程学习笔记 #VLN课程学习笔记 #第四章 学习范式:IL&RL #部分可观测马尔可夫决策过程(POMDP) #VLA #IL vs RL #模仿学习 #典型:seq2seq模型 #数据增强:Speaker
VLN学习笔记 [!quote|#5fb236]+ Test Hello xhost+ docker run -itd --gpus all \ -v /dev/shm:/dev/shm \ -v /tmp/.X11-unix:/tmp/.X11-unix \ -v $(pwd)/data:/root/VLN-CE/data \ -e DISPLAY=$DISPLAY \ hccz95/vlnce:main test python run.py --exp-config vlnce_baselines/config/r2r_baselines/nonlearning.yaml --run-type eval [!quote|#5fb236]+ Reference In …
本周我系统学习了VLN,核心收获如下: 学习范式:模仿学习(IL)快速入门但性能有限,强化学习(RL)能超越专家但效率低,两者结合(IL+RL)成为主流。 预训练模型:通过自监督学习(如MLM、ITM)让模型掌握跨模态理解,典型模型有PREVA
REVERIE数据集和DUET模型 现在都是还在前期的学习和探索阶段。 读这篇论文: REVERIE: Remote Embodied Visual Referring Expression in Real Indoor Environments (CVPR 2020) REVERlE 发音 [ˈrevəri] DUET(Dual-scale Graph Transformer) REVERIE 是 REVERIE: Remote Embodied Visual Referring Expression in Real Indoor Environments (CVPR 2020) 中引入的大规模远程
📘 Reference Information Title: AerialVLN: Vision-and-Language Navigation for UAVs Authors: Liu, Shubo; Zhang, Hongsheng; Qi, Yuankai; Wang, Peng; Zhang, Yanning; Wu, Qi Publication: (2023) Citekey: liuAerialVLNVisionandLanguageNavigation2023 DOI: 10.1109/ICCV51070.2023.01411 Links: Online | PDF 🧾 Metadata Start date: 2025-10-01 End date: …

0 Academic Profile (EN) Basic Information Yiqian Gong (CodeAlan) M.Eng. student in Electronic Information, SUSTech National Graduate College for Engineers (NGCE), Southern University of Science and Technology (SUSTech), China. My current research interests lie in Embodied AI and Vision-Language Navigation (VLN), with a focus on how agents …