实战教程
2025-11-27
首页
欢迎来到 CodeAlan’s Blog
记录 UAV / 具身智能 / VLN 的学习与实践。
标签
共 29 篇文章
知识路线图
按时间大致梳理与「Ubuntu」相关的文章,可作为学习路线的参考。
欢迎来到 CodeAlan’s Blog
Docker部署Nextcloud及其使用方法 Docker安装 Docker 是一个开源的应用容器引擎,基于 Go 语言 并遵从 Apache2.0 协议开源。 Docker 可以让开发者打包他们的应用以及依赖包到一个轻量级、可移植的容器中,然后发布到任何流行的 Linux 机器上,也可以实现虚拟化。 容器是
docker自启动 设置docker自启动 systemctl enable docker 创建时设置自启动 docker run -d --restart=always --name 设置容器名 使用的镜像 (上面命令 --name后面两个参数根据实际情况自行修改) # Docker 容器的重启策略如下: --restart具体参数值详细信息: no // 默认策略,容器退出时不重启
报告的主要内容如下: 嘉立创EDA概述:介绍嘉立创EDA的发展历程、版本差异及其在国产EDA工具中的定位。 多维对比分析:使用表格和文字对比嘉立创EDA与主流EDA工具在功能、目标用户和商业模式上的差异。 易用性与集成生态:分析嘉立创EDA的入门
配置git 和 github 安装 sudo apt-get install git 配置本地 此用户名和邮箱是git提交代码时用来显示你身份和联系方式的,并不是github用户名和邮箱 git config --global user.name "YOUR_NAME" git config --global user.email "YOUR_EMAIL" example git config --global user.name "CodeAlan" git config --global user.email "2546379375@qq.com" 检查配置信息 git config --global …
Latex笔记 支持中文编译 \usepackage{ctex} \usepackage{anyfontsize} 编译模式改为XeLaTex 插入的图片使其紧跟文字后面 LaTeX 中插入图片使其紧跟插入的文字之后 - CuriousZero - 博客园 \usepackage{float} \begin{figure}[H] \centering \includegraphics[width=0.8\textwidth]{fig.png} \caption{xxx} \end{figure} 插入代码 LaTeX 插入代码块 - Undefined443 - 博客园 \usepackage{fancyvrb} \usepackage{xcolor} % …
这是一篇用于测试 PDF 链接展示效果的示例文章。 外部 PDF 示例: AerialVLN 论文 PDF 你也可以像这样链接自己站点下的 PDF(假设你将文件放在 static/files/ 目录): 本地示例 PDF 当链接以 .pdf 结尾时,页面会: 自动在新标签页打开该 PDF; 在链接右侧显示一个小小的 “PDF” 徽标,方便区分普
讲解 Project1 Task2 中 Seq2Seq 基线模型的实现细节,并分析训练指标(SR、SPL、NavError)的预期趋势与含义。
Project2 任务是复现文章,最难受的是配环境,这里我把可能会遇到的大坑做一些提示。 但是环境的坑,千人千面,遇到问题,随时在群里交流。 任务1 Habitat模拟器的安装与基础操作 说明 为适配VLN-CE的依赖,我们采用老版本 habitat-sim v0.1.7 ,最新版本的安装与使用请自行
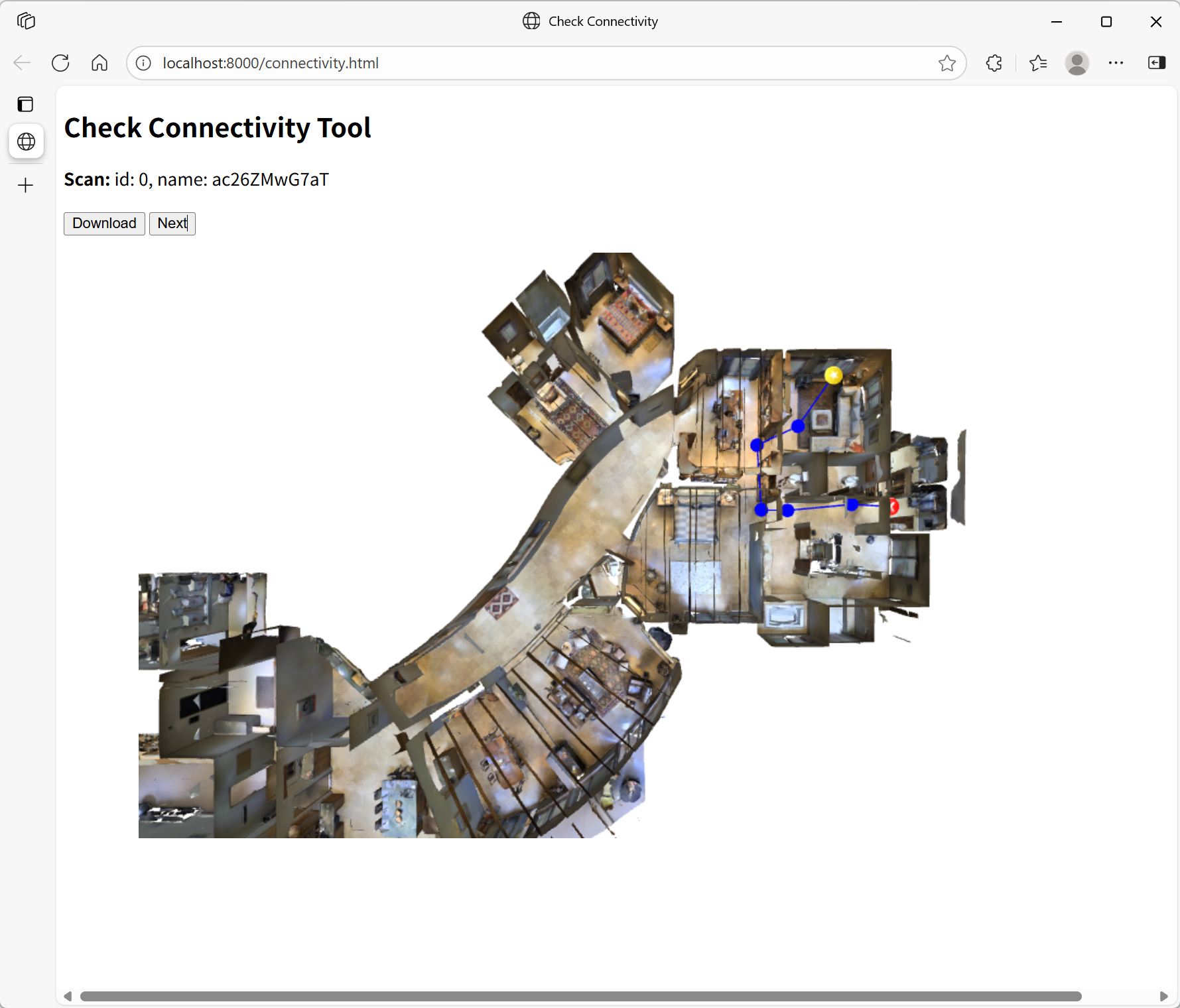
Project 3: REVERIE数据集与DUET模型 总体目标 深入理解 **REVERlE (Remote Embodied Visual Referring Expression in Real Indoor Environments)**数据集结构及路径可视化方法。 掌握并复现 **DUET(Dual-scale Graph Transformer)**模型,理解其在多模态指令导航与目标定位中的工作机制。 REVERlE 发音 [ˈrev
AerialVLN模拟器与AirVLN任务 总体目标 1.掌握AerialVLN模拟器的安装 学会如何搭建AerialVLN模拟器。 2.复现AirVLN任务 准备AirVLN相关的数据集,并了解数据组成,复现AirVLN任务。 任务0 建立工作目录 mkdir AirVLN_ws
ROS_notes 换源 sudo cp /etc/apt/sources.list /etc/apt/sources.list.back sudo gedit /etc/apt/sources.list 将内容替换为 清华源 deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal universe deb …

ros1与ros2共存 系统环境20.04 ros1版本 ros-noetic ros2版本 ros-galactic 为了省事,我们习惯将source写到.bashrc文件(若是不同的解释器如zsh,则为.zshrc文件) sudo gedit ~/.bashrc 在bashrc末尾加入: source /opt/ros/noetic/setup.bash 每次打开terminal时如何切换
Ubuntu Docker调试笔记 安装Nvidia驱动和CUDA https://developer.nvidia.com/cuda-12-8-0-download-archive?target_os=Linux&target_arch=x86_64&Distribution=Ubuntu&target_version=20.04&target_type=deb_network 安装Docker 基于Ubuntu20.04 Ubuntu | Docker Docs 安装NVIDIA Container Toolkit Installing the NVIDIA Container Toolkit — NVIDIA Container Toolkit vscode …
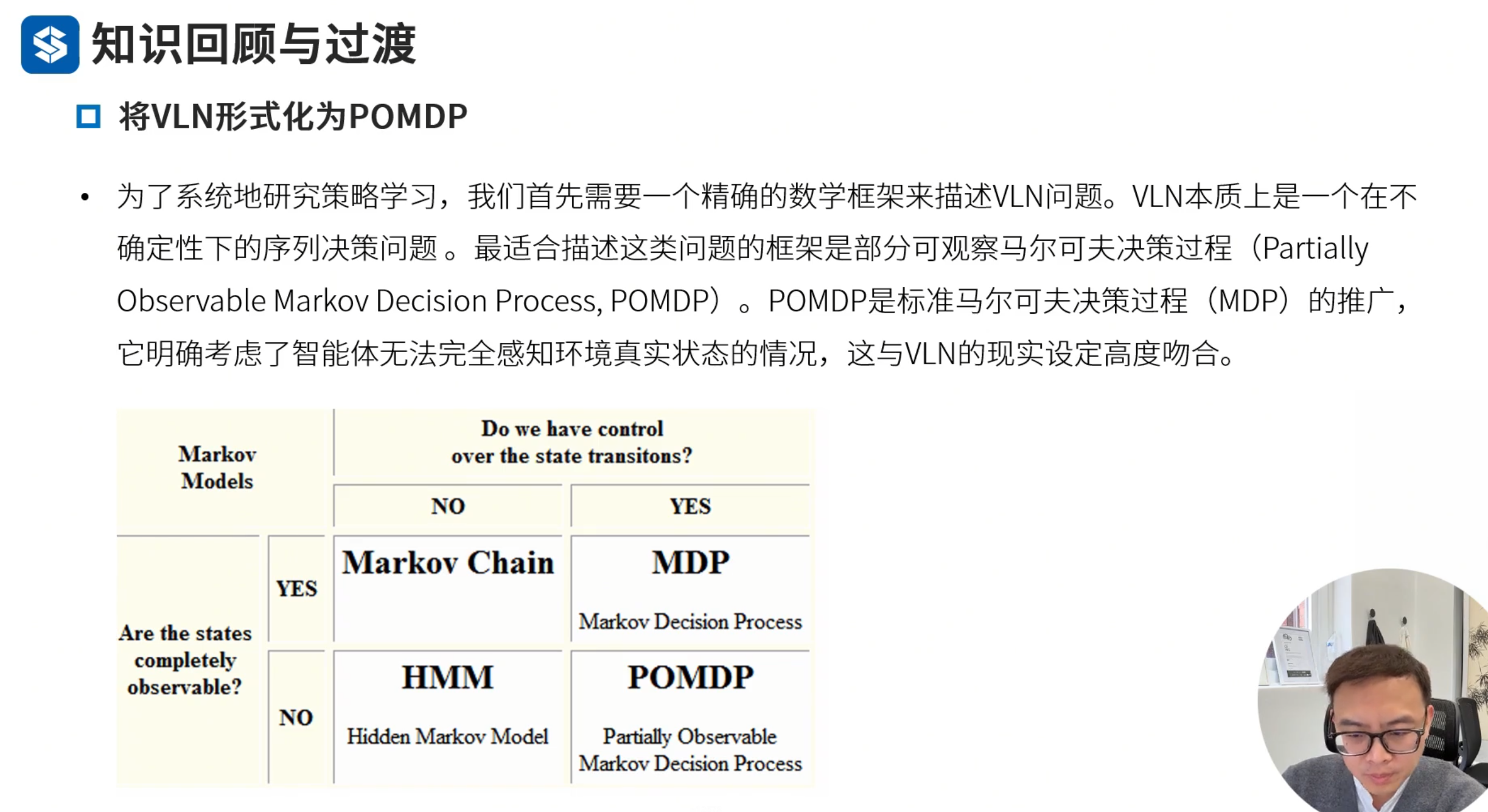
详解DeepSeek-R1核心强化学习算法:GRPO https://zhuanlan.zhihu.com/p/21046265072 VLN课程学习笔记 #VLN课程学习笔记 #第四章 学习范式:IL&RL #部分可观测马尔可夫决策过程(POMDP) #VLA #IL vs RL #模仿学习 #典型:seq2seq模型 #数据增强:Speaker

2018-2022模型演化
VLN学习笔记 [!quote|#5fb236]+ Test Hello xhost+ docker run -itd --gpus all \ -v /dev/shm:/dev/shm \ -v /tmp/.X11-unix:/tmp/.X11-unix \ -v $(pwd)/data:/root/VLN-CE/data \ -e DISPLAY=$DISPLAY \ hccz95/vlnce:main test python run.py --exp-config vlnce_baselines/config/r2r_baselines/nonlearning.yaml --run-type eval [!quote|#5fb236]+ Reference In …
zsh&ohmyzsh配置指南 zsh sudo apt install zsh ohmyzsh sh -c "$(wget https://raw.githubusercontent.com/ohmyzsh/ohmyzsh/master/tools/install.sh -O -)" 这里大概率会遇到DNS污染问题 解决办法: 1.访问域名查询网址: https://ipaddress.com/ 2.查询域名ip,搜索框中输入: raw.githubusercontent.com,自由复制一个查询到的IP 3.修
这是一篇用于测试 KaTeX 渲染的数学示例文章。 行内公式示例:爱因斯坦质能方程 $E = mc^2$。 块级公式示例: $$ \int_{0}^{1} x^2 , dx = \frac{1}{3} $$ 再比如一个带求和的公式: $$ S_n = \sum_{k=1}^{n} k = \frac{n(n+1)}{2} $$
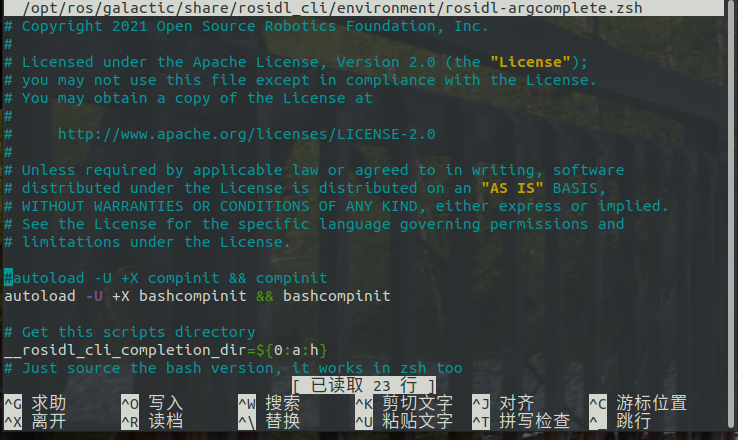
zsh中ros2 tab自动补全 环境: Ubuntu20.04 ros-galactic 以galactic为例 sudo nano /opt/ros/galactic/share/rosidl_cli/environment/rosidl-argcomplete.zsh 将下行注释掉 autoload -U +X compinit && compinit #autoload -U +X compinit && compinit colcon自动补全 将下列命令加入 ~/.zshrc 末尾 eval "$(register-python-argcomplete3 colcon)" 最后重新source一下配置 source …